
OpenCV-12 Hough detection
by
본 포스팅은 여기, 여기, 여기. 여기 를 참고하여 만들었습니다.
HoughLine
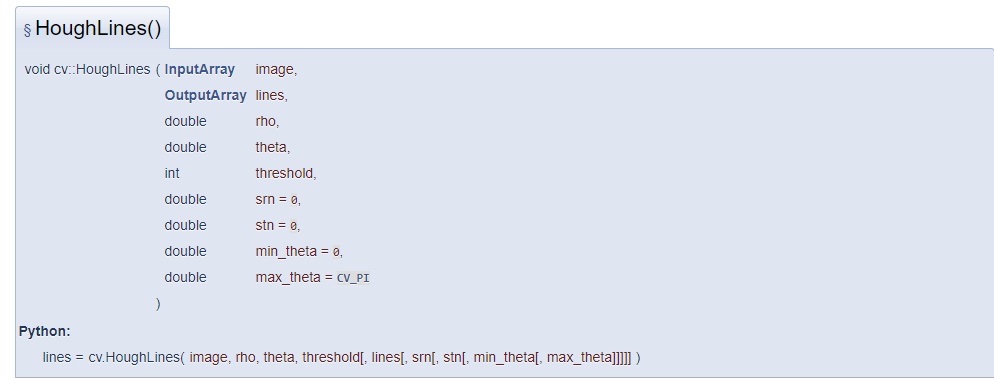
image : 입력 이미지
line : 라인들이 저장될 array
rho : 계산할 픽셀(매개 변수)의 acculumator의 해상도, 1일시 default(원본)
theta : 계산할 각도(라디안, 매개변수)의 해상도, 선 회전 각도 모든 방향에서 직선을 검출시 PI/180 사용
threshold : 변환된 그래프에서 라인을 검출하기 위한 최소 교차수
HoughLine에서의 좌표계 변환
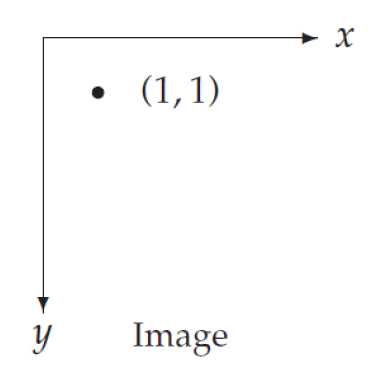
(x, y) 좌표계 상에서 (1, 1)을 지나는 직선의 방정식은, y = ax + b에 (1, 1)을 대입한 식이고, 이는 곧 (a, b)좌표계에서 1 = a + b임과 같다.
이를 여러 점에 대해 수행 후 좌표계를 바꾸어 보면, 다음과 같은 좌표계 상의 값들을 얻을 수 있다.
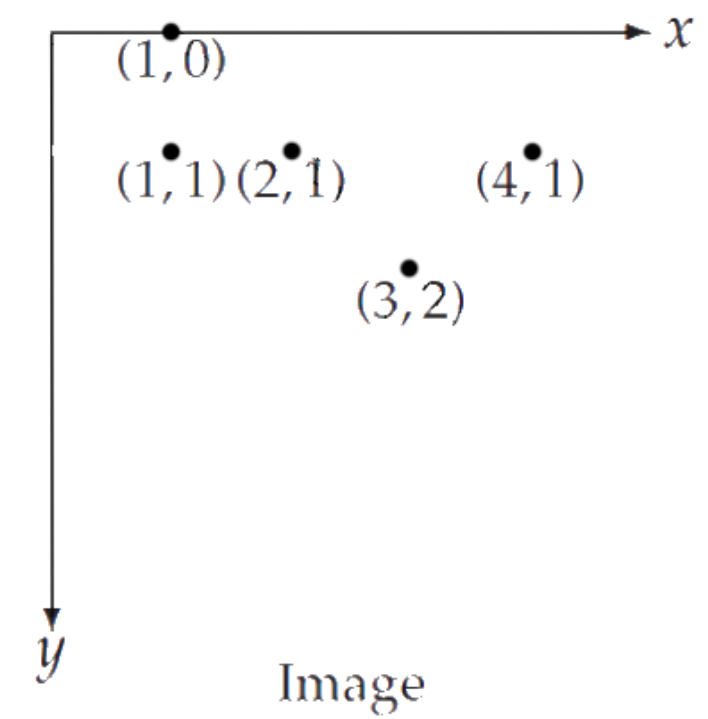
(위는 xy 좌표계가 ab좌표계로 바뀐 모습이다.)
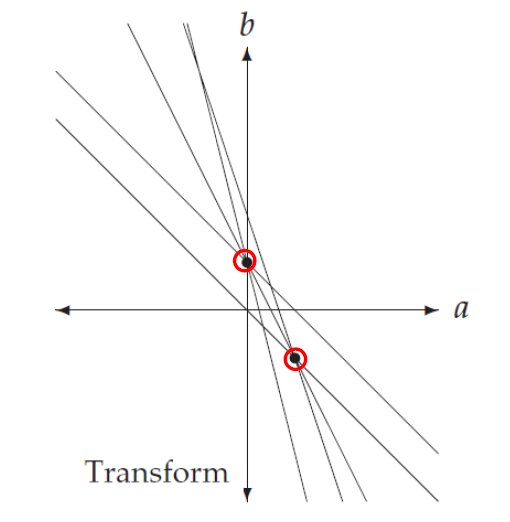
위 ab 좌표계에서, 선들이 세 번 이상(threshhold = 3인 경우) 접하는 경우일 떄의 (a, b)값을 구하여, 다시 xy좌표계로 변환하면, 다음과 같은 그림을 얻을 수 있다.
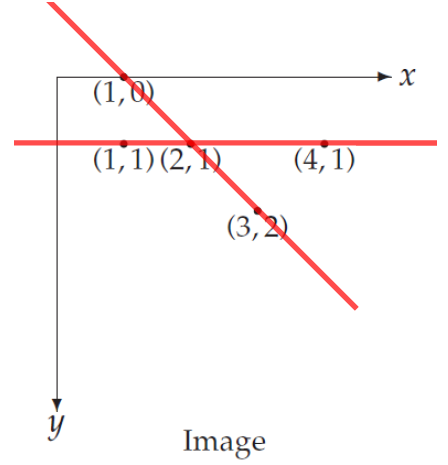
허프 변환은, 이러한 방식으로 직선을 검출한다.
HoughCircles

원을 찾기 위해선, 모든 점에 대해 x, y, r 세 가지 값을 모두 찾아주어야 하기에 상당히 비효율적이다.
비효율성을 줄이기 위해 openCV는 모든 픽셀에 대해 세 변수 값을 찾지 않고 가장자리의 기울기를 측정하여 원을 그리는 Hough Gradient 방법을 사용한다.
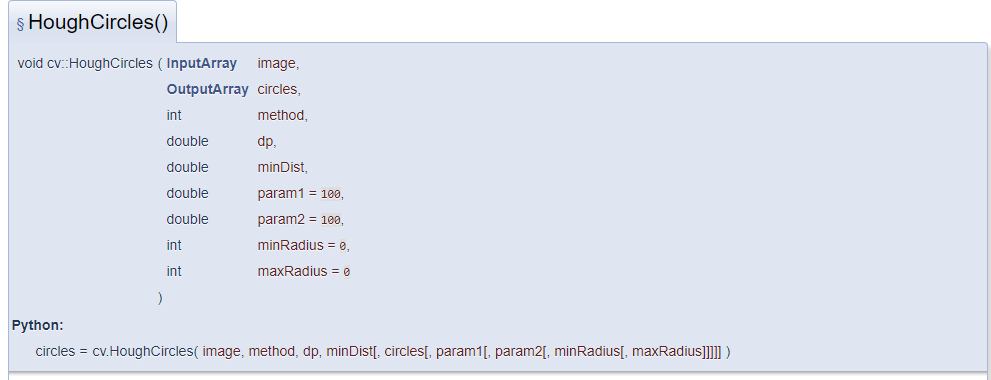
들어가는 인자를 순서대로 살펴보면,
image : 입력으로 들어가는 Mat(gray scale)
circles : 검출할 원의 중심 정보들이 저장될 array
method : 원 검출 방법(HOUGH_GRADIENT)
dp : (accumulator)/(input image의 해상도), 1이면 accumulator 와 image의 해상도가 같고, 2이면 accumulator의 해상도가 input image의 반 이다.(좀 더 너그럽게 찾는 듯)
minDist : 원과 원과의 거리. 작을수록 원들간의 거리가 좁아도 검출된다.
parameter1 : 내부적으로 사용하는 canny edge 검출기에 전달되는 Paramter (경계를 찾는데 사용되는 부분이라 생각)
parameter2 : accumulator의 threshhold값. 높을수록 원을 찾는 기준이 엄격하다.
minRadius, MaxRadius : 원의 최소, 최대 반지름. 0일 시 반지름에 상관 없이 모두 찾는다.
Vec3i : (int , int , int)인 자료형
다음은 원의 자료형에 대해 간단히 살펴보겠다.
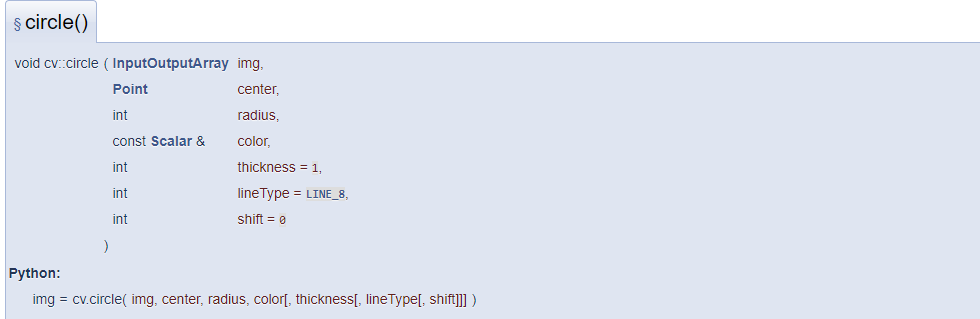
img : 원이 그려질 Mat
center : center의 좌표(x, y)
Radius : 반지름
그 후 (선의 색, 굵기, 선 타입, shift 순)이다.
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main()
{
VideoCapture cap1(1);
vector<Vec3f> circles;
int is_applied;
if (!cap1.isOpened())
{
cout << "카메라 연결 불가" << endl;
}
Mat frame1;
Mat frame_gray;
namedWindow("Video", WINDOW_AUTOSIZE);
is_applied = 0;
while (1)
{
cap1 >> frame1;
if (is_applied == 1)
{
cout << "circle detecting" << endl;
cvtColor(frame1, frame_gray, cv::COLOR_BGR2GRAY);
HoughCircles(frame_gray, circles, HOUGH_GRADIENT, 1, 100, 50, 65, 0, 0);
//해상도 그대로 사용, parameter2 에 65의 값 할당
for (size_t i = 0; i < circles.size(); i++)
{
Vec3i c = circles[i]; //circle 배열의 원들 하나씩 가져옴
Point center(c[0], c[1]); //(x, y) 값 할당
int radius = c[2]; //반지름 할당
circle(frame_gray, center, radius, Scalar(0, 255, 0), 2);
circle(frame_gray, center, 2, Scalar(0, 0, 255), 3);
imshow("Video", frame_gray);
}
}
else if (is_applied == 2)
{
Mat frame_canny;
cout << "line detecting" << endl;
cvtColor(frame1, frame_gray, cv::COLOR_BGR2GRAY);
Canny(frame_gray, frame_canny, 150, 255); //캐니 변환
vector<Vec2f> lines; //(float, float)인 벡터형
HoughLines(frame_canny, lines, 1, CV_PI / 180, 150); //threshhold로 150의 값 이용
Mat img_hough; //원본 이미지에 라인을 추가한 mat
frame1.copyTo(img_hough);
Mat img_lane; //canny알고리즘으로 라인을 그릴 mat
threshold(frame_canny, img_lane, 150, 255, THRESH_MASK);
for (size_t i = 0; i < lines.size(); i++) //직선을 그리는 부분
{
float rho = lines[i][0], theta = lines[i][1]; // i 번째 라인의 rho, theta값 저장
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a * rho, y0 = b * rho;
pt1.x = cvRound(x0 + 1000 * (-b));
pt1.y = cvRound(y0 + 1000 * (a));
pt2.x = cvRound(x0 - 1000 * (-b));
pt2.y = cvRound(y0 - 1000 * (a));
line(img_hough, pt1, pt2, Scalar(0, 0, 255), 2, 8); //원본에 line 그리기
line(img_lane, pt1, pt2, Scalar::all(255), 1, 8); //canny mat에 라인 그리기
}
imshow("Video", img_hough);
imshow("img_lane", img_lane);
}
if (is_applied == 0)
{
imshow("Video", frame1);
}
int key = cv::waitKey(5);
if (key == 'c')
{
is_applied = 1;
}
else if (key == 'd')
{
is_applied = 2;
}
if (key == 27)
{
break;
}
}
return 0;
}
Subscribe via RSS