
OpenCV-7 Canny edge detection
by
Canny edge detection
Canny edge detection은 4개의 stage로 구성된다.
Stage 1. 가우시안 필터를 통한 노이즈 제거(blurring 효과를 통해 엣지를 찾는데 용이함)
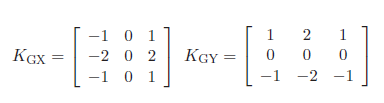
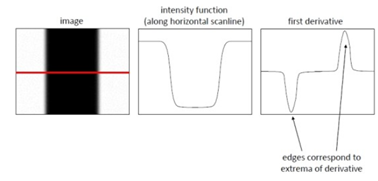
Stage 2. Gradient 값 높은 부분 찾기 : x축, y축 gradient가 높은 부분을 찾기 위해 sobel 마스크를 convolution한다.
영상에서는 sobel마스크를 씌우는 것이, 미분의 효과를 낸다.
이를 통해 가장 빠르게 증가한 방향, 그리고 그 값을 알 수 있다.
그 값(norm)을 이용하여 증가량 비교, 방향을 찾을 수 있다.
Stage 3. Non maximum suppression : 가짜 Edge를 검출하여 제거하는 부분이다.
Local maximum 부분만을 에지 픽셀로 설정하는 기법인데, 같은 그래디언트의 방향중 가장 큰 값을 지닌 픽셀만 남겨두고 나머지는 0으로 만든다.
즉 그 픽셀 기준 제일 큰 값 제외 8개의 픽셀은 0값을 갖게 한다.
Stage 4. double threshholding : 임계치를 기준으로 파랑 이하 값은 버리고, 주황은 약한 엣지, 빨강은 강한 엣지로 둔다.
주황에 해당하는 약한 엣지 부분의 픽셀의 8방향에 대해 강한에지와 연결되어 있으면 그 정보를 살리고, 아니면 그 엣지를 0으로 둔다.

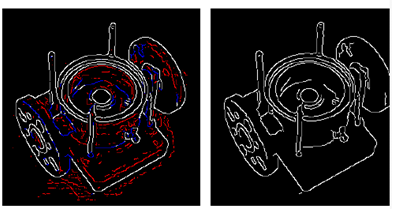
위 그림에서 왼쪽은 약한 에지와 강한 에지가 합쳐진 그림이고, 오른쪽은 연관성 있는(살아남은) 약한 에지와 강한 에지가 합쳐진 그림을 나타낸 것이다.
코드
#include <opencv2/opencv.hpp>
using namespace cv;
//슬라이더가 위치를 변경할 때마다 호출되는 함수에 대한 포인터
//여기서 첫 번째 매개 변수는 트랙 바 위치이고 두 번째 매개 변수는 사용자 데이터
//콜백이 NULL 포인터이면 콜백이 호출되지 않고 업데이트만 됨.
static void on_trackbar(int, void*) {
}
void Show_canny(Mat frame);
int main()
{
VideoCapture cam(0); //opecncv에서 욎아 카메라에서 영상 받아놓는 역할
Mat frame;
cam.set(CAP_PROP_FRAME_WIDTH, 1280); //프레임의 너비, 높이를 (1280, 720)으로 고정
cam.set(CAP_PROP_FRAME_HEIGHT, 720);
if (!cam.isOpened())
{
printf("카메라 없음\n");
return -1;
}
namedWindow("Canny");
//Track bar 만들기
//인자 : (트랙바 이름, 윈도우 이름, 트랙바 최소값, 트랙바 최대값, 호출 함수)
createTrackbar("low threshold", "Canny", 0, 1000, on_trackbar);
createTrackbar("high threshold", "Canny", 0, 1000, on_trackbar);
//트랙바 초기 값 지정
setTrackbarPos("low threshold", "Canny", 50);
setTrackbarPos("high threshold", "Canny", 150);
Mat img_gray;
img_gray = imread("1.jpg", IMREAD_GRAYSCALE);
while (cam.read(frame))
{
if (frame.empty())
{
printf(" --(!) No camd frame -- Break!");
break;
}
Show_canny(frame);
if (waitKey(1) == 27)
break;
}
destroyAllWindows();
return 0;
}
void Show_canny(Mat frame)
{
int low = getTrackbarPos("low threshold", "Canny");
int high = getTrackbarPos("high threshold", "Canny");
Mat frame_gray;
cvtColor(frame, frame_gray, COLOR_BGR2GRAY);
Mat img_canny;
Canny(frame_gray, img_canny, low, high);
printf("low : %d high : %d\n", low, high);
imshow("Canny", img_canny);
}
Subscribe via RSS