
OpenCV-13 Optical Flow
by
본 포스팅은 여기, 여기, 여기 를 참고하여 만들었습니다.
Optical Flow
Motion estimation을 하는 방식에는 크게 Block matching과 Optical flow 두 가지의 방법이 존재하는데, 후자에 관한 내용이다.
Optical Flow 를 한국말로 번역하면 광학 흐름으로, 두 개의 연속된 비디오 프레임 사이에 이미지 객체의 가시적인(카메라의 이동 등으로 생기는) 동작 패턴을 말한다.
주로 움직임을 통한 구조 분석, 블러 된 영상을 정제하는데 주로 사용하는 기술이다.
Optical Flow의 개념
2D 이미지 내에서 (x, y, t)(좌표, 시간)에서의 픽셀의 밝기를 Intensity I(x, y, t)라 하자.
극소량 t에 대해 픽셀의 Intensity 는 변하지 않는다고 가정 할 때,작은 움직임 δx와 δy가 각각 x, y의 축에서 일어났다고 하면, 그때의 intensity는 I(x + δx,y + δy,t + δt)라고 나타낼 수 있다.
이를 식(1)으로 표현하면 다음과 같다.

그리고, 다음 테일러 급수 식을 살펴보면 다음과 같다.

위 테일러 급수에서 2차 이상의 항은 무시하고 위 I(x + δx,y + δy,t + δt)를 표현해 보면(2), 다음과 같다.

(변수 세 개에 대해 각 변수에 대해 편미분 한 꼴)
식(1)과 (2)가 같아야 하므로,
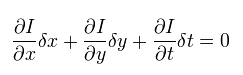
을 만족해야 하고, 이식을 δt로 나누어주면,
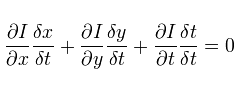
를 얻을 수 있다.
이 때 δI/δx, δI/δy ,δI/δt 는 각각 이미지 I 에 대한 x, y, t의 방향(편미분),
δx/δt, δy/δt 는 각각 x, y 방향으로의 속도 임을 알 수 있다.
위 식을 정리하여 쓰면 최종적으로 위 식과 같이 정리된다.
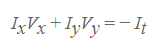
즉 영상을 x, y, t 방향으로 으로 미분 한 후(It구하기) 식에 넣으면 Vx, Vy를 얻을수 있다는 개념이다.
위 개념을 응용하여 Lucas-Kanade 방식을 사용하면 각 픽셀에 대한 모션 벡터 값을 얻을 수 있다고 한다.
Lucas-Kanade는 영상 내 이미지 사이의 시간적, 공간적 연속성과 이웃한 픽셀들의 움직임은 함께 간다는 것을 가정하여 각 픽셀에 대한 모션 벡터를 얻는 개념인데, 위 포스팅에선 다루지 않겠다.
goodFeaturesToTrack()
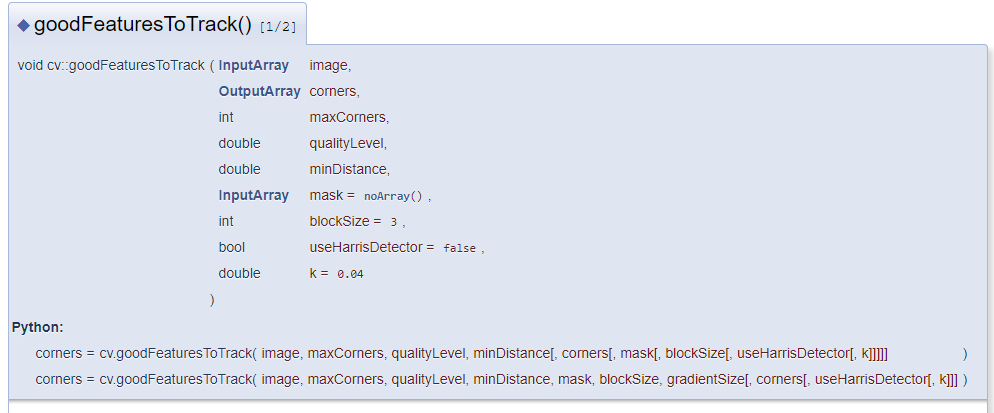

input 이미지
feature로 찾은 좌표들
corner로 리턴할 좌표의 최대 수
이미지 퀼리티의 thereshhold
코너들 사이의 최소 유클라디안 거리
interest한 영역에서만 찾을지 (Mat() 일 시 전체에 대해 코너 찾음)
편미분에 사용할 block의 사이즈
등이 인자로 들어간다.
calcOpticalFlowPyrLK()

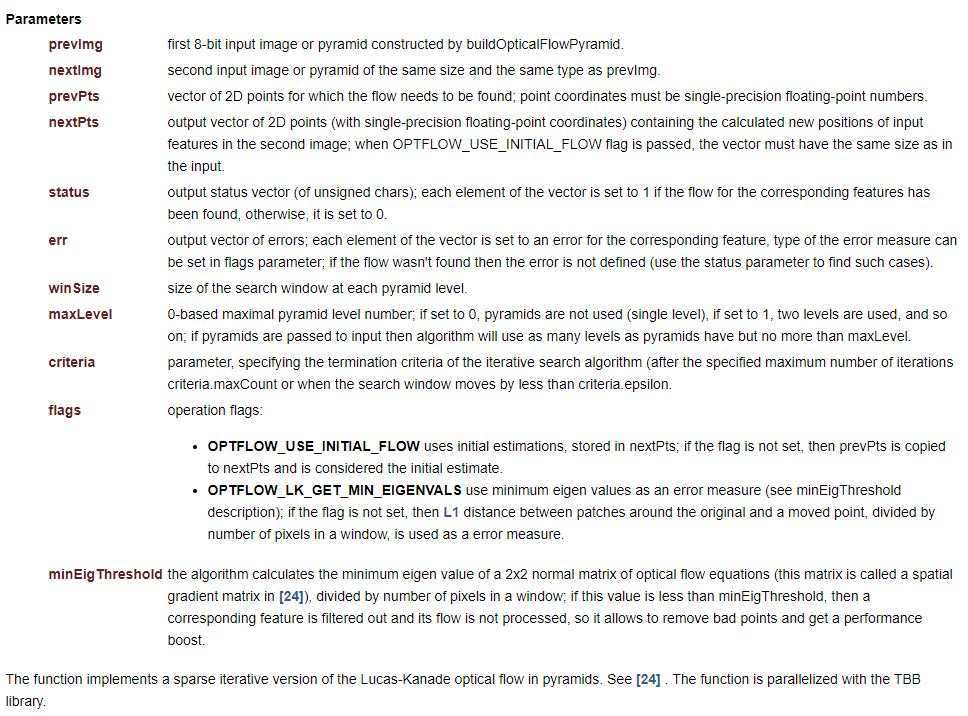

status : 다음 프레임에서 똑같은 feature가 찾아졌을 경우 각 벡터의 element들은 1, 아닐시 반환
err : 벡터의 element가 해당 feature에 대한 error로 설정됨, 오류 측정의 유형은 flag로 설정 가능 (이해 x)
window : search window의 사이즈
max pyramid : 0일시 피라미드 안 쓰임, 1 일 시 if pyramids are passed to input then algorithm will use as many levels as pyramids have but no more than maxLevel..? 피라미드를 사용한다는게 무슨 말인지 모름
(+ FPN에서 나온 피라미드와 똑같은 개념, 피라미드란 원근감에 따라 이미지의 물체의 형태가 바껴 보임을 인지하여 scale 변화에 강건하게 해주는 개념이다.)
CODE
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main()
{
VideoCapture cap1(1);
int is_applied;
if (!cap1.isOpened())
{
cout << "카메라 연결 불가" << endl;
}
Mat frame_pre;
Mat frame_pre_gray;
Mat frame_now;
Mat frame_now_gray;
Mat output;
is_applied = 0;
vector<Scalar> colors; //Scalar = ( , , , ,) 인 자료형
RNG rng; //컬러 표시를 위한 난수 생성
for (int i = 0; i < 100; i++)
{
int r = rng.uniform(0, 256);
int g = rng.uniform(0, 256);
int b = rng.uniform(0, 256);
colors.push_back(Scalar(r, g, b));
}
vector<Point2f> p0, p1; //( , ) 변위 보기 위해 벡터에 각각 좌표 담기
while (1)
{
cap1.read(frame_pre); //이전 프레임 받기
if (is_applied == 1)
{
destroyWindow("Video_first");
//cout << "circle detecting" << endl;
cvtColor(frame_pre, frame_pre_gray, COLOR_BGR2GRAY); //gray 상에서 찾기 위한 변환
goodFeaturesToTrack(frame_pre_gray, p0, 100, 0.3, 7, Mat(), 7, false, 0.04); //previous frame에서 좋은 feature인 점 찾기
Mat mask = Mat::zeros(frame_pre.size(), frame_pre.type()); //그림 그릴 빈 Mat 생성
//현재 프레임
cvtColor(frame_now, frame_now_gray, COLOR_BGR2GRAY);
vector<uchar> status;
vector<float> err;
TermCriteria criteria = TermCriteria((TermCriteria::COUNT)+(TermCriteria::EPS), 10, 0.03); //반복적인iterative 연산을하는 알고리즘의 종료 기준을 정의
calcOpticalFlowPyrLK(frame_pre_gray, frame_now_gray, p0, p1, status, err, Size(500, 500), 2, criteria);
vector<Point2f> good_new;
for (uint i = 0; i < p0.size(); i++) //코너의 사이즈만큼 찾음
{
if (status[i] == 1) { //똑같은 feature를 찾은 경우
good_new.push_back(p1[i]); //good_new 에 해당 now의 좌표 집어넣음
// draw the tracks
line(mask, p1[i], p0[i], colors[i], 2, 2); //pre, now 의 좌표 이음(빈 Mat에서)
circle(frame_now, p1[i], 1, colors[i], -1); //now의 좌표 동그랗게
}
}
add(frame_now, mask, output); //circle + line 합쳐서 보여주기
//imshow("Video_previous", frame_pre);
//imshow("Video_now", frame_now);
//imshow("mask", mask);
imshow("output", output);
//p0 = good_new;
}
else if (is_applied == 0)
{
imshow("Video_first", frame_pre);
}
////////////////카메라 제어 부
int key = cv::waitKey(2);
if (key == 'c')
{
is_applied = 1;
}
if (key == 27)
{
break;
}
cap1.read(frame_now); //이후 프레임 받기
}
return 0;
}
Subscribe via RSS